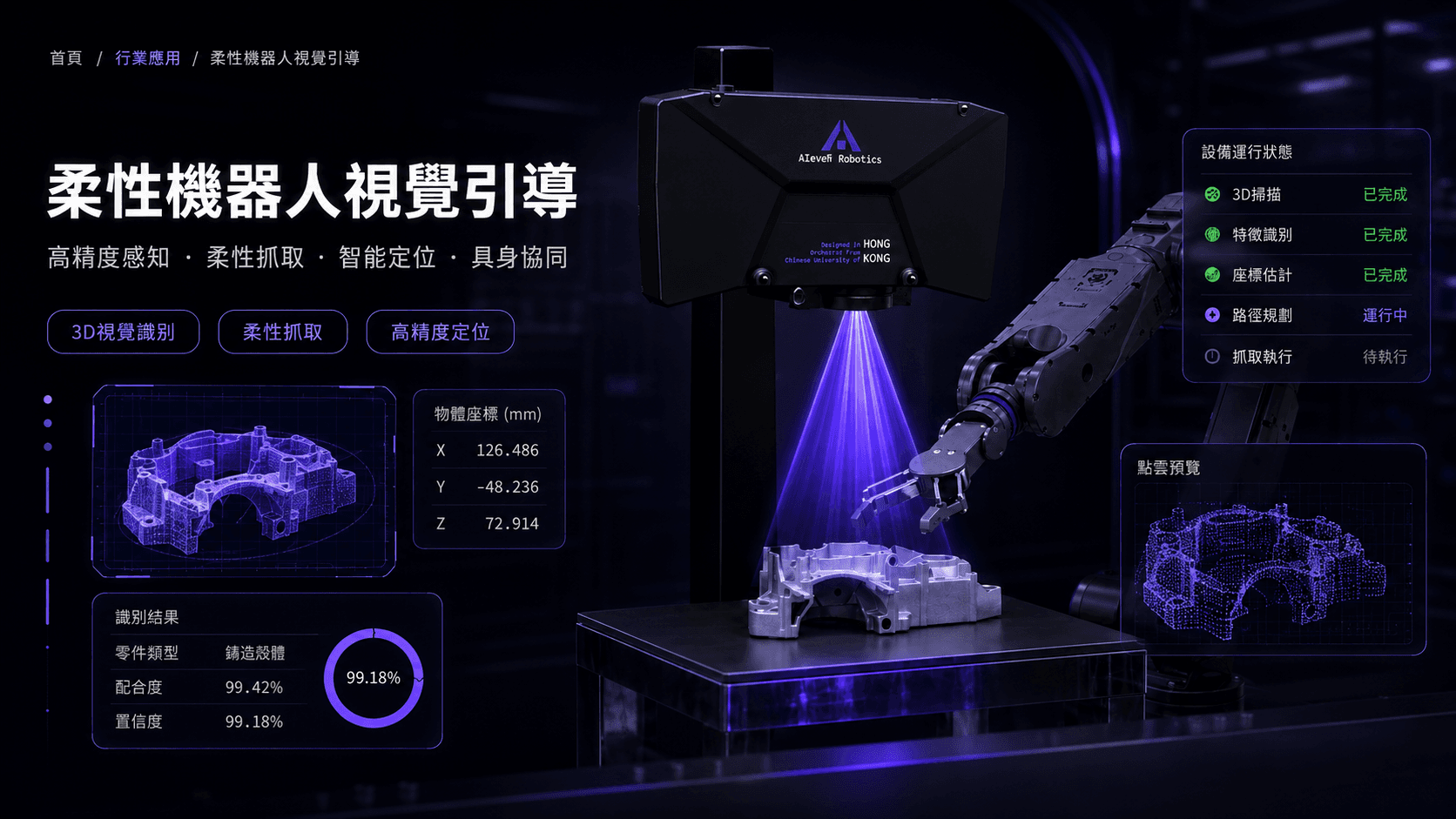
打磨機器人視覺引導及軌跡規劃
3D結構光 DS-A10700 配合工業機械臂,AIRVision 進行工件定位、曲率計算與特徵提取,軌跡規劃軟件自動生成打磨路徑;AI 模型結合人工判斷生成打磨工藝,配合浮動力控實現精準打磨。
查看詳情
3D結構光 DS-A10700 配合工業機械臂,AIRVision 進行工件定位、曲率計算與特徵提取,軌跡規劃軟件自動生成打磨路徑;AI 模型結合人工判斷生成打磨工藝,配合浮動力控實現精準打磨。

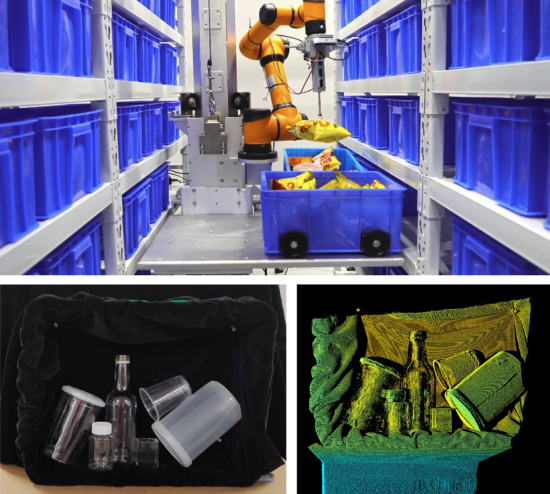
3D視覺引導機器人自動抓取。A 系列相機 DS-A10700-P 專門針對透明等特殊材質進行優化,視野範圍 840mm × 640mm,拍攝時間 0.8 秒。
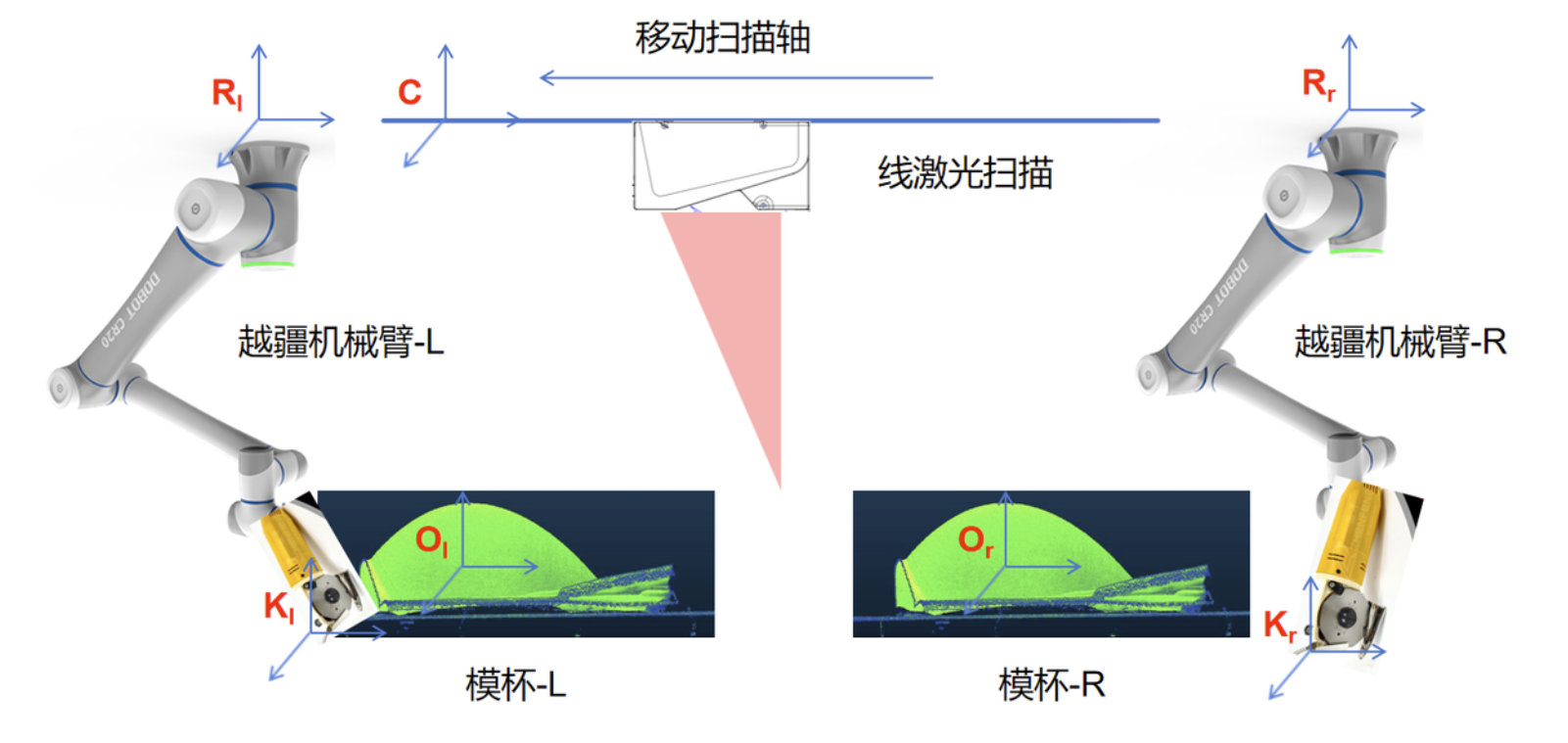
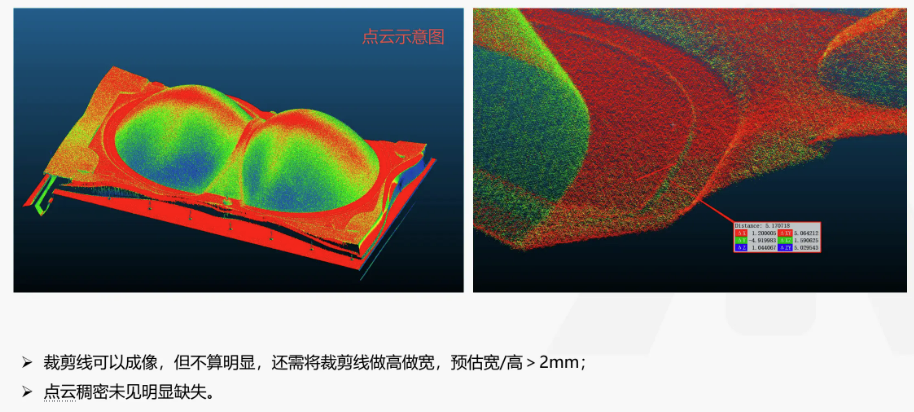
服裝為立體剪裁,傳統視覺難以做切割軌跡規劃;彈性布料容易變形,造成誤差。自研 L 系列 DS-L10400 相機配合移動平台掃描布料,AIRVision 定位裁剪線並生成軌跡,協作臂沿著生成的軌跡執行裁剪。

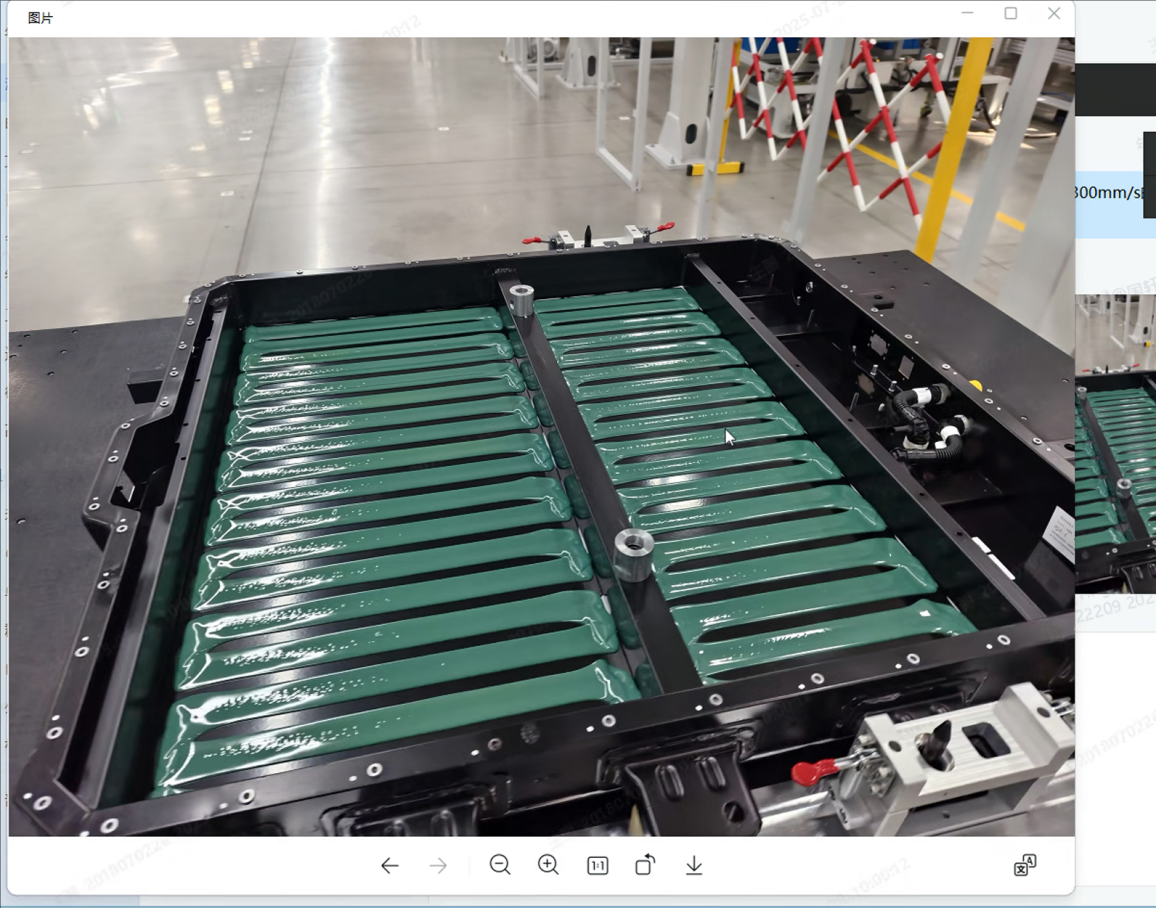
協作臂掛載自研 3D 結構光相機 A10400 掃描電池盒底部,AIRVision 定位電池盒並分割底面,計算塗膠路徑及每個點位的塗膠速度。
3D 視覺可在透明、黑色等複雜材質場景中完成重建,配合機器人抓取策略實現無人零售場景下的自動分揀。
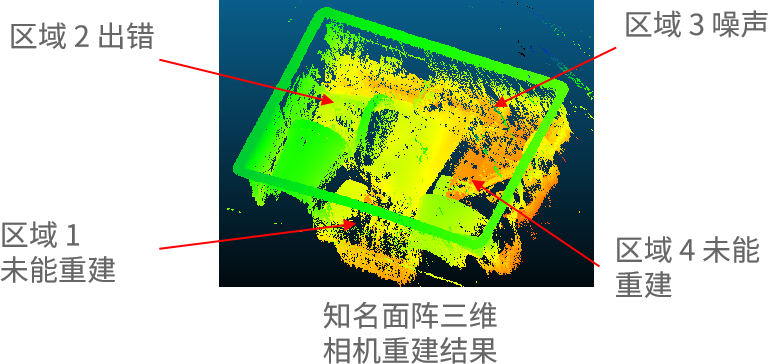
工件為異型件且金屬反光較強,對成像和上下料精度有較高要求;採用眼在手上的 3D 視覺方案,提供高質量點雲和更高換型靈活性。
針對鈑金件反光、表面不規則和來料位置偏移,採用手上安裝方式與大視野定位,糾正來料偏差並將相機拍照與點雲處理控制在 2 秒內。
面向不同尺寸箱子混碼擺放、箱體無規律堆疊等物流場景,結合多維視覺引導與抓取策略,提升包裹拆碼垛和上料效率。